 2011-5-5‧電腦經緯儀‧天文研究攝影對策篇
2011-5-5‧電腦經緯儀‧天文研究攝影對策篇
‧筆者追隨聖人的腳步,從小就很賤所以會做許多卑鄙的事情(論語:「吾少也賤故多能鄙事」)。
‧在 Google 和 Yahoo! 搜尋「8cm」排序第一就是本格推理。在網路搜尋赤道儀、極軸修正(極軸校正)、光軸校正、周期誤差、精度(追蹤精度)、天文攝影等多項名詞,一樣會很容易找上本格推理,不必非用「8cm」搜尋不可。
這次筆者要討論電腦經緯儀的障礙,雖然筆者對於歷來各天文台電腦經緯儀的運作現況是完全不瞭解的,但是就像筆者從未親身或旁觀光軸調整作業一樣,知道原理就知道坊間實務作業錯誤在哪裡,這就是筆者高中數學老師所說的『這就是數學的厲害』。
電腦經緯儀的操作方程式是很簡單的(這是以筆者的程度為準),不必看球面天文學的書籍,筆者一樣很快做得出來,但是大家連赤道儀的極軸都抓不準,操作電腦經緯儀做天体追蹤一定是用光電系統追著星星跑,做不到防禦性導星的程度。連赤道儀單軸穩定順向旋轉都做不到的話,換用電腦經緯儀是三軸不定速旋轉,更是極度困難。
所以,先培養能力看懂以下的,再來學人家講什麼『自適應』之類的。坊間絕大多數學人講『自適應』的,其實連一台小赤道儀都自己適應不了。
電腦經緯儀的控制是由三度空間座標兩兩換算為方位與仰角(光是極軸精準狀態下的『換算』就對精度很傷的),理論上如果電腦經緯儀的極軸有對準,那麼要先面對一堆三角函數衍生的方位、仰角、望遠鏡視野旋轉的計算與換算,這時方程式看起來很簡單,但是這些三角函數的正体可是『無理數』、『微積分』耶(筆者大學因為微積分延畢,顯示這個微積分真是高深呀!),偏偏大家極軸又都沒有對準(用漂移法和極望會準才怪),這下子問題就大了,因為方程式裡的三角函數計算元會因極軸不準而繁衍出數十倍或數百倍(到底有幾倍筆者會算,但原諒筆者懶得算,看到下面的方程式相片誰都懶得算的),還有一個驚人的恐怖事件是追蹤作業期間分分秒秒要面臨圓周率的數十次方(或數百次方)運算,一大堆無理數乘除下來,最後補上一個四捨五入就可能搞到齒輪忽進忽退失去精度功虧一匱。

當然,這些都是可以預防的,只是大多數的預防手段無助於提升精度,只有先對準極軸才能讓需要『預防』的情況降到最低。
極軸一旦出現偏差‧方程式就會多出很多很多
懂BASIC的就看得出來相片只是其中極小部份
這是台式研究‧外國沒有這個(若有這個極軸早就都對得準準準了)
筆者是內行也算過,所以千萬拜託電腦經緯儀的極軸一定要對準,否則電腦在這樣的計算環境下會有多大的誤差,可以回去問國高中數學老師就知道(從前有人用16位元BASIC盡了全力也和理想值發生0.3%要命巨大偏差),不知道這點還敢誇讚選用電腦經緯儀,只能說是台灣人常講的『憨胆』了,電腦經緯儀的績效不佳的原因之一就在這裡。
坊間很多不知道理想值是多少,
當然也就不知道電腦運算誤差到底有多少,
還以為只要是電腦計算就一定100%準確。
最後還有一個恐怖關卡是周期誤差,在極軸設定良好的情況下,赤道儀是以恆星時單軸穩定旋轉,若用感應器硬解抑止周期偏差就輕快解決,但是電腦經緯儀的方位、仰角兩組齒輪都是不等速運轉,沒辦法用感應器硬解,過中天的關鍵時刻還要面臨仰角逆轉(齒輪回差事態發生)。
電腦經緯儀的望遠鏡視野旋轉看似等速率,其實不是這樣的,望遠鏡視野旋轉速度隨著極軸偏差大小不同,速度不是恆定的,而且涉及橢圓幾何對應望遠鏡光學形變等等是無法簡速計算,所以拜託極軸給他用單星雙軸法對好,只要極軸對準望遠鏡視野旋轉就可與恆星時完美穩定同步。
因為往昔大家都沒辦法對準赤道儀極軸,給人赤道儀追蹤誤差也很大的印象,所以好像選用電腦經偉儀也不錯,但是現在赤道儀導星失控的情形已經解決,精準導星還是用赤道儀就好,即使攝星鏡口徑要因此必需減少一半也很值得。
對於導星不準的人來說,口徑就是一切,但對導星精準的人來說,口徑屬於次要非必要指標。在數位攝影時代,大氣層內地面天文台研究攝影的『集中力』比『集光力』重要,也就是說比口徑大小的時代已經過去了,追蹤管理會是各天文台的技術差異所在,先贏硬解再贏軟解才是完美作法。
筆者不會覺得電腦經緯儀一無是處,它也有厲害的地方,多年前筆者就在日本天文攝影雜誌裡看過,有業餘天文愛好者用電腦經緯儀追蹤太空站(有連結太空梭)拍攝相片,感到非常佩服,不知道是怎樣算出來的,筆者也不是什麼都知道的,很多要想很久才想得出來,但這是齒輪高速順轉的高速曝光相片,和天文研究級攝影實屬不同場合。
有些重點還是要持續強調的,首先是選擇導星的問題,恆星的導星不需要選擇視野內的恆星,像拍M42星雲時,選擇天狼星或北極星都一樣可以當作導星的,因為單一極軸偏差事件對全天恆星的導星偏差是一樣的(也就是說全天每一個恆星的導星偏移偏移的方位角度都會是同步的,不能說100%完全沒差,但在一般攝影期間偏差量會遠低於大氣擾動),所以沒有找不到導星的問題,真正的問題是不知道全天隨便找一個超亮恆星都可以當作導星,這一點確實違背坊間常識,手工導星或光電導星做一次就知道,極軸誤差越小越有效(把北極星導入極望視野中央附近就夠了,不必精確準位,數學上的效果就足以充分成立了)。 
在相同的極軸偏差場合,無論是用天狼星或北極星做為導星,兩者都會同時呈現幾乎100%相同的情形,連筆者也無法分辨兩者差異,所以完全沒必要以視野內的暗星做為導星,也不存在有找不到導星的問題。依據下表粗估上圖的極軸偏差只有0.008度角(28.8秒角‧請勿奢望強求極望每次做到這種失格水準),修正方向如下圖。 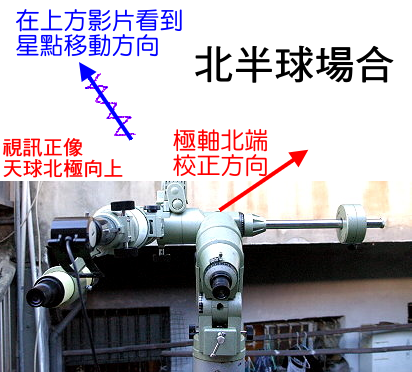

如果可以隨意找亮星來導星,這樣導星鏡組合的選擇性就寬廣許多,「窺管」就是下一 次瞄準配件進化,卻也會是一次逆進化。 另外一個討論,就是很多導星不佳是技術不良所致,但是卻常把責任歸咎於望遠鏡剛性不足有形變,其實曝光也就那幾分鐘而已,現代數位攝影又沒有什麼相互則不軌(又稱互換則不依)之類的問題,不如擔心風吹要好好固定約束避免晃動比較實在,大家擔心剛性問題結果望遠鏡越買越重,其實導星失敗的責任分配比重如何分配,應該還有檢討空間,當然用光電導星來敷衍也是速效方法,有了光電導星就可以把很多問題打包起來拋諸腦後。 對於官派學閥的巨大望遠鏡而言,考量望遠鏡重力形變而做離軸導星離軸導星是有必要,業餘小鏡沒有這個顧慮,也不該把導星不良責任隨便誣賴到形變上頭,因為看相片就可以檢討出來,依據望遠鏡結構來看重力形變會有特別的方向性,誤判機率低於30%。不同的導星不良因素都有特徵可循,看相片可以稍微猜測出來各種因素比重 ,建議先做到下面這樣自動追蹤再追究有無形變。
做到這個程度導星超簡單‧赤道儀極軸偏差是難以估計的微小
即使把大氣擾動誣賴為極軸偏差所致‧極軸偏差亦在0.00003度以下
用對方法第一次就可以100%做到‧不必碰運氣矇好運 (這是筆者第一次用單星雙軸法校正‧因為是初體驗故花了兩小時)
結論是準確的極軸是靠手指關節輕敲出來的‧自動化機械很難做到 有些評估是說光電導星效果有好有壞,其實這也是有可能改善的,善於運用 極軸管理技術,可以讓光電導星的工作負擔降低很多,各方因素各退一步,光電感知和運作介入效率就會提升,在北半球只要極軸微微升舉就可以,升舉的角度計算可以參考以下連結,大家只要照自己的赤道儀精度做比例增減就可以,也就是精度6.5秒角的赤道儀要升舉0.2度。 看到這裡會覺得一頭霧水是正常的,以上大多屬於在台灣本地多年來逐漸發展的技術,台灣以外文獻找不到是正確無誤,二十幾年來在台灣大約只有幾人理解,早先在本格推理全有見解沒有隱藏,逐篇參考就可以慢慢瞭解。 
2010-04-26‧極軸管理理論最速實戰‧赤道儀卡卡篇http://mypaper.pchome.com.tw/8cm/post/1320892297 2010-05-04‧赤道儀北端要升舉多少角度才足以消除周期誤差的減速呢?http://mypaper.pchome.com.tw/8cm/post/1320922195 ※精度6.5秒角的意思是周期誤差全幅13秒角,高級赤道儀要加計大氣擾動全幅3秒角,例如精度4秒角的要以5.5秒角計算(周期誤差全幅11秒)。 |
這年頭沒有牽拖配件才趕得上流行
輕淨美茶 第一話、第二話
筆者輕快研究‧也喝輕快茶品
下次就來講這個輕快故事
文章定位:
人氣(1,222) | 回應(0)| 推薦 (
0)| 收藏 (
0)|
轉寄
全站分類:
不分類


