 2011-4-22‧赤道儀追蹤精度‧皮帶式驅動齒輪有助於減少次級周期誤差篇
2011-4-22‧赤道儀追蹤精度‧皮帶式驅動齒輪有助於減少次級周期誤差篇
‧筆者追隨聖人的腳步,從小就很賤所以會做許多卑鄙的事情(論語:「吾少也賤故多能鄙事」)。
‧在 Google 和 Yahoo! 搜尋「8cm」排序第一就是本格推理。
筆者要把話要先說在前面,如果沒能用單星雙軸法單獨拜周期誤差的話,建議盡快點選瀏覽器左上角的←符號,以免浪費寶貴休閒時間。
赤道儀的驅動/減速齒輪組被划動的速度不一,會導致第一、二級周期誤差的產生,前些日子筆者看到網路介紹皮帶式齒輪驅動的赤道儀,今天稍微思考了一下,要將相關評估告訴大家。在網路檢索『周期誤差』就很容易找到筆者先前見解,筆者早先提供過的相關繪圖、影片就不在此贅述。
首先是驅動齒輪部份,這是次級周期誤差的來源,兩輪齒相觸/離的瞬間是被運轉速度最快的時候,如果改用皮帶式齒輪居間聯繫兩個齒輪,那麼兩輪齒相觸/離的瞬間速度會因為皮帶的形變造成速度遲鈍,也就是說會讓次級周期誤差的最高速度減緩,最慢速度當然也會隨之加快(這點不用分析也知道,因為每齒之間運動速度與時間是一樣的,速度有減少的部份,就會對應有速度增加的部份),換言之次級周期誤差幅度確實有被減少了。
驅動齒輪運轉影片
【影片初始】下方的步進馬達驅動齒輪以恆星時一倍速開始運轉前進。
【影片開始1分鐘】瞬間逆向十六倍速運轉後維持一倍速運轉。
【影片開始2分鐘時】瞬間順向十六倍速運轉後維持一倍速運轉。
【影片開始3分鐘時】停止轉動直到到影片結束。
驅動齒輪的問題比較好解決,減速齒輪部份就要深刻思考,因為減速齒輪是蝸桿設計,皮帶式齒輪沒有被設計介入的空間,因為從入齒到出齒之間的速度變化,是靠齒輪設計在控制的,沒像驅動齒輪那麼簡單(高級赤道儀的減速齒輪設計較好,所以主要周期誤差比較小),但是要靠齒輪設計抑制主要周期誤差仍有其極限,所以還是要靠感應器做出『硬解』的方法比較輕快簡單有效(也就是筆者說的『三秒俱樂部』)。

減速齒輪結構(參考新版天體望遠鏡GUIDE BOOK)
從這裡開始就是本篇結論,皮帶式齒輪的介入設計確實可以有效減少次級周期誤差,但就赤道儀整體追蹤精度的結果而言,可說是幾乎等於沒有效果,粗估影響低於3%(最高速-3%以內。最低速+3%以內),這和做足一千份的選舉民調誤差值一樣(前提是這份民調是真的)。
但是,如果被驅動齒輪改成總齒數相同,但半邊齒數較多,另一半邊齒數較少的話,透過皮帶式齒輪的的形狀適應機能,就能颯爽做出消除主要周期誤差的結果,這才是皮帶式齒輪的最聰明應用對策。

筆者自用赤道儀要這樣改齒‧就能消除主要周期誤差
總之,只要知道原因所在,製造消除周期誤差的赤道儀不是什麼難事,所有的可行性評估與計算筆者都做好了(詳見先前見解),只要用家懂得怎樣對好赤道儀極軸,就可以用雙筒導星鏡監控追蹤情形,簡單做好長焦長程自動追蹤攝影,追蹤偏差大多隱藏在大氣擾動之內,精度之高會讓極軸設定不良的光電導星無從比擬。
有些重點還是要持續強調的,首先是選擇導星的問題,恆星的導星不需要選擇視野內的恆星,像拍M42星雲時,選擇天狼星或北極星都一樣可以當作導星的,因為單一極軸偏差事件對全天恆星的導星偏差是一樣的(也就是說全天每一個恆星的導星偏移偏移的方位角度都會是同步的,不能說100%完全沒差,但在一般攝影期間偏差量會遠低於大氣擾動),所以沒有找不到導星的問題,真正的問題是不知道全天隨便找一個超亮恆星都可以當作導星,這一點確實違背坊間常識,手工導星或光電導星做一次就知道,極軸誤差越小越有效(把北極星導入極望視野中央附近就夠了,不必精確準位,數學上的效果就足以充分成立了)。 
在相同的極軸偏差場合,無論是用天狼星或北極星做為導星,兩者都會同時呈現幾乎100%相同的情形,連筆者也無法分辨兩者差異,所以完全沒必要以視野內的暗星做為導星,也不存在有找不到導星的問題。依據下表粗估上圖的極軸偏差只有0.008度角(28.8秒角‧請勿奢望強求極望每次做到這種失格水準),修正方向如下圖。 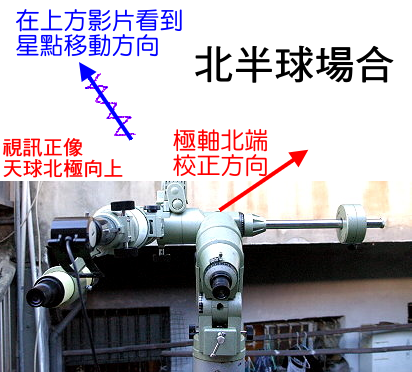

如果可以隨意找亮星來導星,這樣導星鏡組合的選擇性就寬廣許多,「窺管」就是下一 次瞄準配件進化,卻也會是一次逆進化。 另外一個討論,就是很多導星不佳是技術不良所致,但是卻常把責任歸咎於望遠鏡剛性不足有形變,其實曝光也就那幾分鐘而已,現代數位攝影又沒有什麼相互則不軌(又稱互換則不依)之類的問題,不如擔心風吹要好好固定約束避免晃動比較實在,大家擔心剛性問題結果望遠鏡越買越重,其實導星失敗的責任分配比重如何分配,應該還有檢討空間,當然用光電導星來敷衍也是速效方法,有了光電導星就可以把很多問題打包起來拋諸腦後。 對於官派學閥的巨大望遠鏡而言,考量望遠鏡重力形變而做離軸導星離軸導星是有必要,業餘小鏡沒有這個顧慮,也不該把導星不良責任隨便誣賴到形變上頭,因為看相片就可以檢討出來,依據望遠鏡結構來看重力形變會有特別的方向性,誤判機率低於30%。不同的導星不良因素都有特徵可循,看相片可以稍微猜測出來各種因素比重 ,建議先做到下面這樣自動追蹤再追究有無形變。
做到這個程度導星超簡單‧赤道儀極軸偏差是難以估計的微小
即使把大氣擾動誣賴為極軸偏差所致‧極軸偏差亦在0.00003度以下
用對方法第一次就可以100%做到‧不必碰運氣矇好運 (這是筆者第一次用單星雙軸法校正‧因為是初體驗故花了兩小時)
結論是準確的極軸是靠手指關節輕敲出來的‧自動化機械很難做到 有些評估是說光電導星效果有好有壞,其實這也是有可能改善的,善於運用 極軸管理技術,可以讓光電導星的工作負擔降低很多,各方因素各退一步,光電感知和運作介入效率就會提升,在北半球只要極軸微微升舉就可以,升舉的角度計算可以參考以下連結,大家只要照自己的赤道儀精度做比例增減就可以,也就是精度6.5秒角的赤道儀要升舉0.2度。 看到這裡會覺得一頭霧水是正常的,以上大多屬於在台灣本地多年來逐漸發展的技術,台灣以外文獻找不到是正確無誤,二十幾年來在台灣大約只有幾人理解,早先在本格推理全有見解沒有隱藏,逐篇參考就可以慢慢瞭解。 
2010-04-26‧極軸管理理論最速實戰‧赤道儀卡卡篇http://mypaper.pchome.com.tw/8cm/post/1320892297 2010-05-04‧赤道儀北端要升舉多少角度才足以消除周期誤差的減速呢?http://mypaper.pchome.com.tw/8cm/post/1320922195 ※精度6.5秒角的意思是周期誤差全幅13秒角,高級赤道儀要加計大氣擾動全幅3秒角,例如精度4秒角的要以5.5秒角計算(周期誤差全幅11秒)。 |
文章定位:
人氣(2,664) | 回應(0)| 推薦 (
0)| 收藏 (
0)|
轉寄
全站分類:
不分類


